Front-end controlável eletronicamente para qualificação de radares automotivos
O primeiro conjunto de antenas do mundo totalmente controlável eletronicamente.
O primeiro conjunto de antenas do mundo totalmente controlável eletronicamente.
Sua tarefa
A direção autônoma (AD) e os sistemas avançados de assistência ao motorista (ADAS) são os principais fatores que impulsionam inovações no setor automotivo. Os sensores de radar são uma das principais tecnologias para direção autônoma e sistemas avançados de assistência ao motorista e precisam ser testados em diferentes cenários, tais como com pedestres (um objeto que atravessa diante do veículo), ao dirigir na cidade (dirigindo em direção a um veículo parado ou mais devagar) e em viagens entre diferentes áreas urbanas (semelhante a condução em áreas urbanas em que a linha central do veículo de teste não está alinhada com o centro do alvo).
Os cenários de teste de hardware no circuito (HiL) e de veículo no circuito (ViL) com recursos de simulação de alvo mais complexos são necessários para atingir os níveis 4 e 5 de sistemas avançados de assistência ao motorista. A demanda também está aumentando para simulação de radar em bancada e testes funcionais, de forma a acelerar o processo de validação (fig. 1).


Fig. 1: Níveis de sistemas avançados de assistência ao motorista e grau de automação: configurações potenciais do veículo


Fig. 2: Processo de desenvolvimento de sensores em sistemas avançados de assistência ao motorista
Atualmente, os fabricantes de equipamentos de origem e os prestadores de serviços de engenharia utilizam ambientes simulados com sistemas de software no circuito para testar sensores e controlar módulos. As simulações de software são valiosas, mas não conseguem reproduzir as respostas reais e potencialmente imperfeitas dos sensores. Os veículos totalmente autônomos devem lidar com essas irregularidades. É necessário testar na estrada um sistema integrado completo em um protótipo ou em um veículo legalizado para circulação, pois isso permite que os fabricantes de equipamentos de origem validem um produto final antes do lançamento no mercado. Os testes de estrada são importantes para o processo de desenvolvimento, mas eles não são suficientes por si só: são caros, demorados e difíceis de reproduzir.
É necessário fazer mais testes em toda a cadeia de valor de desenvolvimento de sensores e integrar casos de uso simples, como testes de componentes de sensores de radar únicos, e testes de cenários complexos com vários sensores. O objetivo é testar funções de direção autônoma, como controle de navegação adaptativo ou sistemas de frenagem de emergência, sob várias condições de laboratório (veja a fig. 2).
Realizar testes realistas e reprodutíveis de sensores de radar é um desafio na cadeia de valor de sensores:
¹ Redução do piso de ruído do sensor, bem como supressão de alvos de curta distância e potenciais reflexões multipercurso.
A solução da Rohde & Schwarz
Os simuladores de alvo atuais utilizam antenas cornetas como front-ends, onde cada ponto é direcionado para os sensores de radar e simula posições horizontais e verticais movendo a antena mecanicamente. A automação mecânica reduz os tempos gerais de teste. Cada movimento da antena altera o ângulo de chegada (AoA) do eco, levando a erros e à perda de precisão ao renderizar alvos quando as antenas não são recalculadas ou recalibradas.
Para superar as limitações atuais do sistema e lidar com a crescente importância de hardware no circuito e veículo no circuito, a Rohde & Schwarz desenvolveu o avançado conjunto de antenas R&S®QAT100, o primeiro conjunto de antenas do mundo controlável eletronicamente. O R&S®QAT100 simula azimute e elevação ativando pequenas antenas patch. O tempo de comutação entre as antenas é de cerca de 2 ms para simular alvos azimutais que se movam rapidamente (por exemplo, trânsito cruzado em cenários de cruzamento ou ultrapassagem).
Visão geral dos sensores de radar


Estimulação de radar over-the-air (OTA) em elevação e azimute sem mover as antenas fisicamente
Sinal de RF limpo: sem reflexões do front-end
As antenas de placa de circuito impresso têm uma seção transversal de radar (RCS) muito mais baixa do que as antenas cornetas de ganho padrão utilizadas em outros sistemas. O sistema de blindagem eletromagnética R&S®QAT-B50 garante um ambiente isolado de RF.
Solução escalável
Vários front-ends podem ser combinados para simular até 360° do ambiente do radar:
Imune à vibração: perfeitamente ajustado para montagem em teste de veículo no circuito
¹ Campo de visão.
Casos de uso
A instalação modular do R&S®QAT100 pode ser utilizada em várias aplicações diferentes para simulações de alvos de radar.
Testes funcionais ou de componentes
Os testes começam com casos de uso muito simples, como testes de componentes para um sensor de radar único. Para testar se um sensor de radar detecta corretamente um eco e se ele distingue entre dois alvos a uma determinada distância ou a um determinado ângulo, bem como para testar a resolução angular do seu sensor de radar.
Testes em cenários
Os casos de usos secundários incluem testes em cenários, como cenários de trânsito com vários carros, sistemas de frenagem de emergência ou controle de navegação adaptativo. O objetivo é simular alvos em movimento no que diz respeito a azimute, distância, velocidade radial e tamanho do alvo. Dependendo do cenário, um ou vários sensores podem ser simulados.


O R&S®QAT100 tem versatilidade e capacidade para suportar todo o processo ao longo da cadeia de sensores de radar.
Começando com o R&S®QAT100 como dispositivo autônomo para avaliação de desempenho de sensores de radar em estágios iniciais, com instalações clássicas de bancada para aplicações de hardware no circuito e veículo no circuito (com simulador de alvo como back-end) no nível do módulo do sensor de radar ao adaptar um sensor às especificações do fabricante do equipamento de origem (fig. 6).


O front-end padrão R&S®QAT-B11 possui 96 antenas de transmissão e 5 de recepção, divididas em 4 segmentos independentes. A configuração atende aos requisitos de sensores SIMO. O R&S®QAT100 pode ser operado no modo por linhas ou no modo por segmentos, conforme necessário. O modo por segmentos divide cada linha em quatro segmentos, onde cada um possui um conector de RF individual e pode simular até quatro alvos de diferentes direções. O R&S®QAT-B11 pode vir com uma linha receptora/transmissora adicional (R&S®QAT-B2) para adicionar outras 96 antenas de transmissão e 5 de recepção para simular até 8 alvos de diferentes direções ou dois objetos por todo o conjunto de antenas.
O desvio maior entre as antenas receptoras e transmissoras indica que o R&S®QAT-B11 não atende totalmente aos requisitos MIMO, pois ele pode ser desviado em diferentes ângulos. O front-end MIMO de linha única R&S®QAT-B21 possui uma linha de antenas de recepção e uma linha de antenas de transmissão. Cada antena de transmissão é emparelhada com uma antena de recepção para atender aos requisitos MIMO. As 96 antenas de recepção e 96 antenas de transmissão agora estão disponíveis para minimizar os erros de fase e permitir uma fácil validação de radares MIMO com resolução de eco espacial aprimorada em três dimensões.
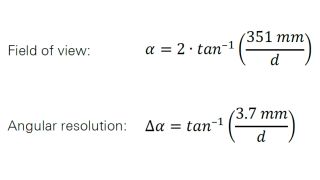
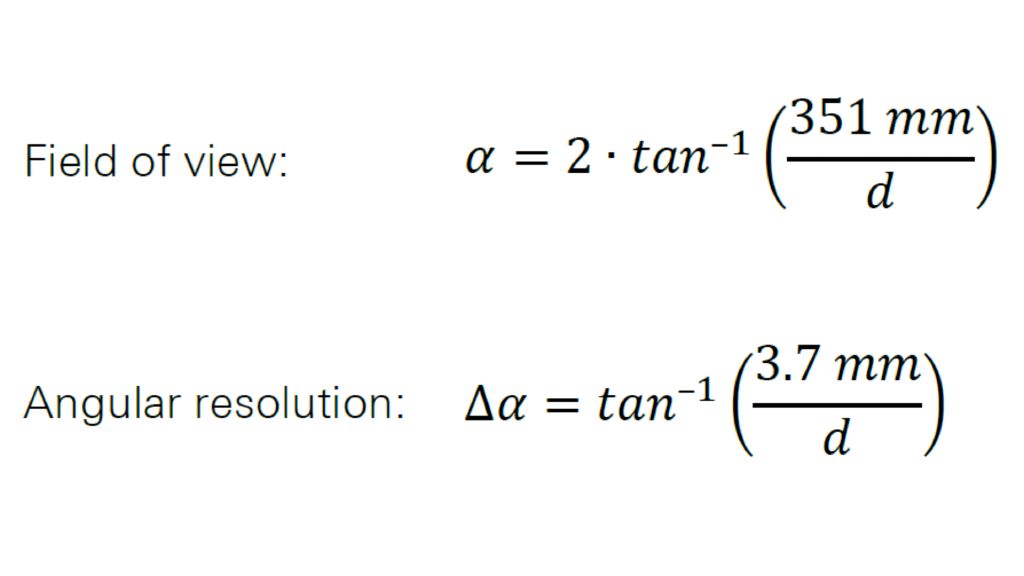
As antenas individuais estão separadas por uma distância de 3,7 mm e a largura total da unidade é de 351 mm. A configuração pode ser adaptada ao sensor. O R&S®QAT100 foi projetado para a potência típica de transmissão de radares de sistemas avançados de assistência ao motorista.
O campo de visão (FOV) e a resolução angular alcançável para o R&S®QAT100 são baseados na configuração e calculados da seguinte forma:
A direção autônoma (AD) e os sistemas avançados de assistência ao motorista (ADAS) são os principais fatores que impulsionam inovações no setor automotivo. Os sensores de radar são uma das principais tecnologias para direção autônoma e sistemas avançados de assistência ao motorista e precisam ser testados em diferentes cenários, tais como com pedestres (um objeto que atravessa diante do veículo), ao dirigir na cidade (dirigindo em direção a um veículo parado ou mais devagar) e em viagens entre diferentes áreas urbanas (semelhante a condução em áreas urbanas em que a linha central do veículo de teste não está alinhada com o centro do alvo).
Os cenários de teste de hardware no circuito (HiL) e de veículo no circuito (ViL) com recursos de simulação de alvo mais complexos são necessários para atingir os níveis 4 e 5 de sistemas avançados de assistência ao motorista. A demanda também está aumentando para simulação de radar em bancada e testes funcionais, de forma a acelerar o processo de validação (fig. 1).




Fig. 1: Níveis de sistemas avançados de assistência ao motorista e grau de automação: configurações potenciais do veículo
Dependendo da distância e da faixa de frequência, os seguintes valores se aplicam:


Para minimizar a influência de interferências externas, um sistema de blindagem eletromagnética adicional fornece um ambiente de RF praticamente livre de interferências, perfeitamente adequado ao R&S®QAT100. O sistema de blindagem eletromagnética pode ser utilizado em bancadas de laboratórios ou em bancadas de teste de veículos. A blindagem eletromagnética fornece um ambiente multipercurso e livre de reflexões para o radar em teste. Quando combinadas com o R&S®QAT100, as pequenas antenas patch com uma superfície coberta por um amortecedor fornecem um front-end de RF limpo e suprimem os alvos de curta distância, bem como possíveis reflexões multipercurso (veja a fig. 10).
Fig. 10: Conjunto de blindagem eletromagnética e montagem
O sistema de blindagem eletromagnética se conecta ao R&S®QAT100 e isola os radares contra os sinais externos. Ele está disponível em tamanhos diferentes conforme o número de conjuntos de antenas avançadas R&S®QAT100 conectados (por exemplo, sistema de blindagem eletromagnética R&S®QAT-Z50 e trio de blindagem eletromagnética R&S®QAT-Z53).

Atualmente, os fabricantes de equipamentos de origem e os prestadores de serviços de engenharia utilizam ambientes simulados com sistemas de software no circuito para testar sensores e controlar módulos. As simulações de software são valiosas, mas não conseguem reproduzir as respostas reais e potencialmente imperfeitas dos sensores. Os veículos totalmente autônomos devem lidar com essas irregularidades. É necessário testar na estrada um sistema integrado completo em um protótipo ou em um veículo legalizado para circulação, pois isso permite que os fabricantes de equipamentos de origem validem um produto final antes do lançamento no mercado. Os testes de estrada são importantes para o processo de desenvolvimento, mas eles não são suficientes por si só: são caros, demorados e difíceis de reproduzir.
É necessário fazer mais testes em toda a cadeia de valor de desenvolvimento de sensores e integrar casos de uso simples, como testes de componentes de sensores de radar únicos, e testes de cenários complexos com vários sensores. O objetivo é testar funções de direção autônoma, como controle de navegação adaptativo ou sistemas de frenagem de emergência, sob várias condições de laboratório (veja a fig. 2).

Fig. 2: Processo de desenvolvimento de sensores em sistemas avançados de assistência ao motorista
A quantidade e os tipos de conexões a um gerador de eco de radar dependem da complexidade da configuração para testes. A complexidade da configuração depende da quantidade de objetos de radar simulados, da quantidade de conjuntos de antenas avançadas R&S®QAT100 ou da quantidade de antenas receptoras (as antenas receptoras sempre recebem, mas só podem emitir sinal quando conectadas a um back-end).
Conforme a quantidade de segmentos de antena controlados individualmente, um gerador de eco de radar deve ter uma determinada quantidade de entradas:
. Todas as antenas de transmissão compartilharão o mesmo sinal.")
. Todas as antenas de transmissão compartilharão o mesmo sinal.")
Fig. 11 - Variante 1: Conecte o sinal de transmissão ao conector "TX Σ" (transmissor Sigma-Delta). Todas as antenas de transmissão compartilharão o mesmo sinal.
 ao conector \"TX D\" (transmissor D). Cada segmento de antena poderá transmitir um sinal diferente, permitindo até quatro alvos por linha transmissora. Conecte as antenas receptoras à \"RX IF In\" (entrada de frequência intermediária do receptor) no gerador de eco do radar. Se você só deseja um único sinal receptor do gerador de eco do radar, conecte o \"RX Select\" (seletor de receptor) a uma \"RX IF In\" (entrada de frequência intermediária do receptor). Para conectar outros dispositivos externos, como um analisador de espectro, use o conector \"RX Select\" (seletor de receptor).")
Fig. 11 - Variante 2: Conecte o sinal de transmissão do conector "TX A" (transmissor A) ao conector "TX D" (transmissor D). Cada segmento de antena poderá transmitir um sinal diferente, permitindo até quatro alvos por linha transmissora. Conecte as antenas receptoras à "RX IF In" (entrada de frequência intermediária do receptor) no gerador de eco do radar. Se você só deseja um único sinal receptor do gerador de eco do radar, conecte o "RX Select" (seletor de receptor) a uma "RX IF In" (entrada de frequência intermediária do receptor). Para conectar outros dispositivos externos, como um analisador de espectro, use o conector "RX Select" (seletor de receptor).
Para sincronizar as frequências de referência, conecte a referência de frequência (entrada ou saída) ao gerador de eco do radar.
Quando equipado com a segunda linha R&S®QAT-B2 de 96 antenas de transmissão, o R&S®QAT100 tem duas linhas com quatro segmentos independentes cada, o que permite que um único instrumento se conecte a oito caminhos de frequência intermediária controláveis individualmente. Isso combina perfeitamente com os oito objetos artificiais completamente independentes simulados por um gerador de eco de radar automotivo R&S®AREG800A totalmente equipado. Cada caminho de frequência intermediária pode ser direcionado livremente dentro de um segmento do R&S®QAT100.
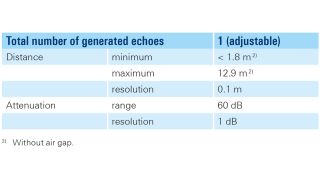
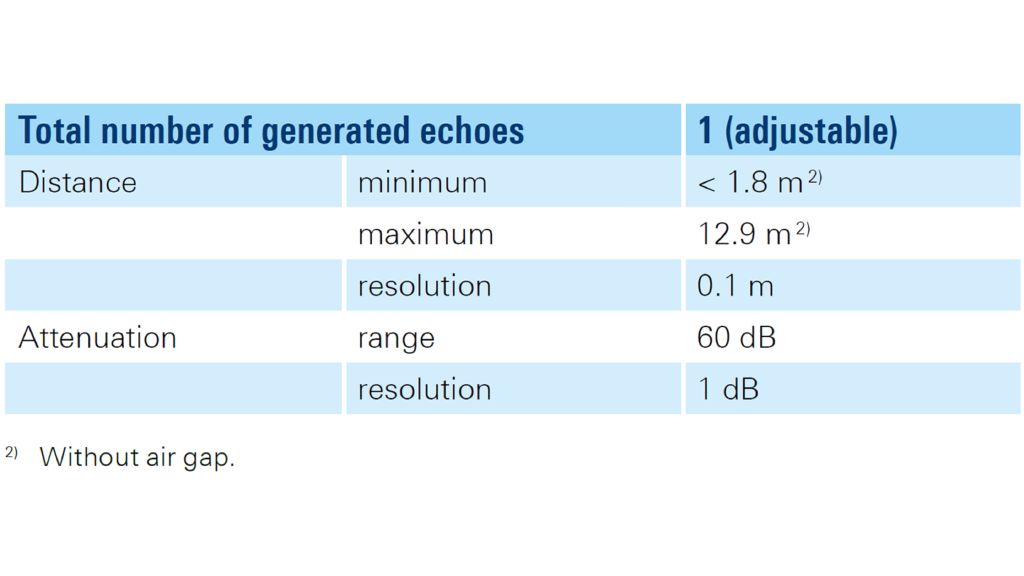
Para simular alvos a uma distância mais curta, o R&S®QAT100 pode ser equipado com uma linha de atraso escalonada analógica (ASDL) para reduzir a linha de atraso mínimo. Esta linha pode simular objetos de radar a distâncias muito curtas (entre 1,8 m e 12,9 m), que são desafiadoras para geradores de eco de radar. Ele também permite o uso autônomo do R&S®QAT100. Para testar a resolução angular do seu sensor de radar, este sensor distingue entre dois alvos a uma determinada distância ou a um determinado ângulo.
Em combinação com um simulador de alvo, o R&S®AREG800A pode simular alvos em movimento.
Realizar testes realistas e reprodutíveis de sensores de radar é um desafio na cadeia de valor de sensores:
¹ Redução do piso de ruído do sensor, bem como supressão de alvos de curta distância e potenciais reflexões multipercurso.
Resumo
Os sistemas autônomos de assistência ao motorista precisam urgentemente de dados confiáveis e de alta qualidade de vários sensores de radar capazes de detectar objetos no ambiente. As empresas e os fornecedores automotivos sabem como pode ser complicado testar esses sensores em cenários de direção autônoma.
O R&S®QAT100 é o primeiro conjunto de antenas totalmente controlável eletronicamente que estimula sensores radares automotivos na faixa entre 76 GHz e 81 GHz. O conceito modular do R&S®QAT100 permite que os fabricantes de equipamentos de origem e parceiros do setor automotivo se concentrem no desenvolvimento e nos testes de sistemas avançados de assistência ao motorista.
Os fabricantes de equipamentos de origem de arquitetura aberta permitem que os fornecedores e os prestadores de serviços integrem facilmente a plataforma R&S®QAT100 à modelagem 3D comercial, aos sistemas de hardware no circuito e aos ambientes de teste e simulação existentes. É possível realizar testes mais rápidos de sensores radares automotivos em toda a cadeia de valor, desde a validação simples de componentes funcionais até os testes em cenários altamente complexos com diversos alvos.











 ao conector \"TX D\" (transmissor D). Cada segmento de antena poderá transmitir um sinal diferente, permitindo até quatro alvos por linha transmissora. Conecte as antenas receptoras à \"RX IF In\" (entrada de frequência intermediária do receptor) no gerador de eco do radar. Se você só deseja um único sinal receptor do gerador de eco do radar, conecte o \"RX Select\" (seletor de receptor) a uma \"RX IF In\" (entrada de frequência intermediária do receptor). Para conectar outros dispositivos externos, como um analisador de espectro, use o conector \"RX Select\" (seletor de receptor).")