차량용 레이더의 검증을 마무리하는 전동식 각도조절 프론트엔드
세계 최초의 완전 전동식 각도조절 배열 안테나
세계 최초의 완전 전동식 각도조절 배열 안테나
목표
AD(자율주행)와 ADAS(첨단 운전자 보조 시스템)는 자동차 산업의 혁신을 주도하는 주요 요인입니다. 레이더 센서는 AD 및 ADAS에 적용되는 핵심 기술 중 하나로, 보행자(차량 앞을 건너는 물체), 시내 운전(정지 또는 느린 속도로 전진하는 차량), 중심선 불일치(테스트 차량의 중심선이 타겟 차량의 중심선과 일치하지 않는 경우) 등 다양한 시나리오의 테스트를 진행할 필요가 있습니다.
ADAS 레벨 4 및 5를 충족하기 위해서는 더욱 복잡한 타겟 시뮬레이션 성능이 구현된 HIL(Hardware-in-the-Loop) 및 VIL(Vehicle-in-the-Loop) 테스트 시나리오가 필요합니다. 검증 프로세스를 더욱 빠르게 수행하기 위해 벤치탑 레이더 시뮬레이션 및 기능 테스트를 실시해야 한다는 의견도 증가하고 있습니다(그림 1).
오늘날 제조사 및 엔지니어링 서비스 제공업체는 Software-in-the-Loop 시스템으로 센서와 컨트롤 모듈을 테스트하는 시뮬레이션 환경을 이용합니다. 소프트웨어 시뮬레이션도 유효하지만 이 방식으로는 실제 환경에서 불완전 가능성이 있는 센서 응답을 복제할 수 없습니다. 완전 자율 차량은 이러한 불규칙성에 대응할 수 있어야 합니다. 제조사는 출시 전 최종 제품의 검증을 위해 프로토타입 또는 도로 주행에 적합한 차량의 전체 통합 시스템에 대한 실제 주행 테스트가 필요할 수 있습니다.주행 테스트는 개발 과정에서 중요한 단계이지만, 많은 비용과 시간이 소요되고 동일한 반복 시험이 어렵기 때문에 주행 테스트만으로 개발을 완료하는 것은 상당히 어렵습니다.
센서 개발의 전체 과정에서 단일 레이더 센서 구성요소 테스트와 같은 간단한 사용 사례 및 복수 센서가 포함된 복잡한 시나리오를 포함하는 추가적인 테스트가 필요합니다.목표는 다양한 실험 조건에서 ACC(Adaptive Cruise Control) 또는 긴급 브레이크 시스템과 같은 자율주행 기능을 테스트하는 것입니다(그림 2 참조).
센서 개발 과정에서 현실 조건을 반영한 반복 가능 레이더 센서 테스트를 수행하는 것은 까다로운 작업입니다.
1) 센서 노이즈 플로어 감소, 인접 타겟 및 잠재적 다중경로 반사 억제.
로데슈바르즈 솔루션
최신 타겟 시뮬레이터는 혼 안테나를 프론트엔드로 사용하여 각 포인트가 레이더 센서를 타겟팅하며 안테나를 기계적으로 움직여 수평 및 수직 위치를 에뮬레이션합니다. 기계식 자동화는 전반적인 테스트 시간을 증가시키는 요인입니다. 안테나가 움직임일 때마다 에코 신호의 AoA(Angle of Arrival)가 바뀌기 때문에 안테나의 재계산 또는 재교정 없이 타겟을 렌더링할 경우 에러와 부정확성이 발생할 수 있습니다.
로데슈바르즈는 최신 시스템의 한계를 극복하고 더욱 중요해지는 HIL 및 VIL에 대응하기 위해 세계 최초로 전동 각도 조절을 지원하는 R&S®QAT100 Advanced Antenna Array를 개발했습니다. R&S®QAT100은 소형 패치 안테나를 활성화하여 방위와 고도를 시뮬레이션합니다. 안테나 간 약 2 ms의 스위칭 시간으로 방위각을 빠르게 바꾸며 움직이는 타겟(예: 교차로를 지나가는 트래픽 또는 통과 시나리오)을 시뮬레이션합니다.
레이더 센서 개요


안테나를 물리적으로 움직이지 않고 고도 및 방위각의 OTA 레이더 시뮬레이션
Front End의 반사가 없는 깔끔한 RF
PCB 안테나는 기타 시스템에서 사용하는 일반 게인 혼보다 RCS가 훨씬 낮습니다. R&S®QAT-B50 Shielding System은 차폐 RF 환경을 보장합니다.
확장형 솔루션
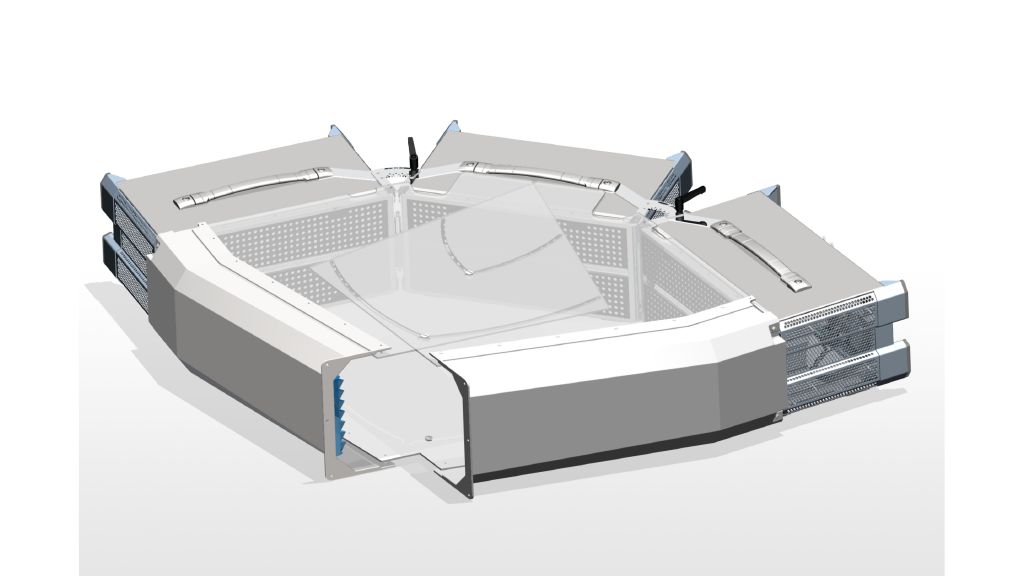
다수의 프론트엔드를 결합하여 최대 360° 레이더 환경을 시뮬레이션할 수 있습니다.
진동 면역성: VIL 테스트베드 장착에 최적
1) Field of View(시야각).
사용 사례
레이더 타겟 시뮬레이션을 위한 다양한 애플리케이션에서 R&S®QAT100의 모듈식 셋업을 사용할 수 있습니다.
구성요소 또는 기능 테스트
기본적인 사용 사례는 단일 레이더 센서의 구성요소 테스트입니다. 레이더 센서가 에코를 정확히 탐지하는 기능을 테스트할 경우 레이더 센서는 특정 거리 또는 특정 각도에서 두 타겟을 구분하고 레이더 센서의 각도 분해능을 탐지해야 합니다.
시나리오 테스트
부가적인 사용 사례로 여러 차량이 이동하는 트래픽 시나리오, 긴급 브레이크 시스템, ACC(Adaptive Cruise Control) 등이 있습니다. 목표는 방위각, 거리, 시선 속도, 타겟 크기에서 움직이는 타겟을 시뮬레이션하는 것입니다. 시나리오에 따라 하나 이상의 센서를 시뮬레이션할 수 있습니다.


R&S®QAT100은 레이더 센서 사슬의 전체 프로세스에 대응하는 성능과 다양한 애플리케이션을 지원합니다.
독립적인 장비로 설계된 R&S®QAT100은 초기 개발 단계에서 레이더 센서 성능을 평가하기 위해 적용하는 일반적인 벤치탑 셋업 사례부터 제조사 규격에 따라 센서를 구성하고 레이더 센서 모듈 레벨에서 HIL 및 VIL 애플리케이션(타겟 시뮬레이터를 백엔드로 사용)에 활용하는 사례까지 지원이 가능합니다(그림 6 참조).
R&S®QAT-B11 standard frontend에 포함된 96개 송신 및 5개 수신 안테나는 4개의 독립된 세그먼트로 구분됩니다. 이 구성은 SIMO 센서 요구사항을 충족합니다. R&S®QAT100은 필요에 따라 라인 모드 또는 세그먼트 모드로 작동할 수 있습니다. 세그먼트 모드는 각 라인을 각각의 개별 RF 커넥터가 포함된 4개 세그먼트로 나누며 다른 방향에서 최대 4개 타겟을 시뮬레이션할 수 있습니다. R&S®QAT-B11에 96개 송신 및 5개 수신 안테나를 추가하는 TX/RX Line(R&S®QAT-B2)을 적용하면 각기 다른 방향에서 최대 8개 타겟을 시뮬레이션하거나 전체 배열에서 두 개의 물체를 시뮬레이션할 수 있습니다.
R&S®QAT-B11의 RX와 TX 안테나 간 오프셋이 크다면 신호의 입사각이 다른 각도로 한 번에 크게 변경될 수 있기 때문에 MIMO 측정 요구사항을 완전히 충족하지 못합니다. R&S®QAT-B21 single-line MIMO frontend에는 수신 안테나 1개 라인과 송신 안테나 1개 라인이 있습니다. 모든 송신 안테나는 수신 안테나와 페어링되어 MIMO 요구사항을 충족합니다. 이제 96개 수신 안테나와 96개 송신 안테나를 사용하여 위상 오류를 최소화하고 MIMO 레이더를 손쉽게 검증하면서 삼차원으로 공간 에코 분해능을 개선할 수 있습니다.
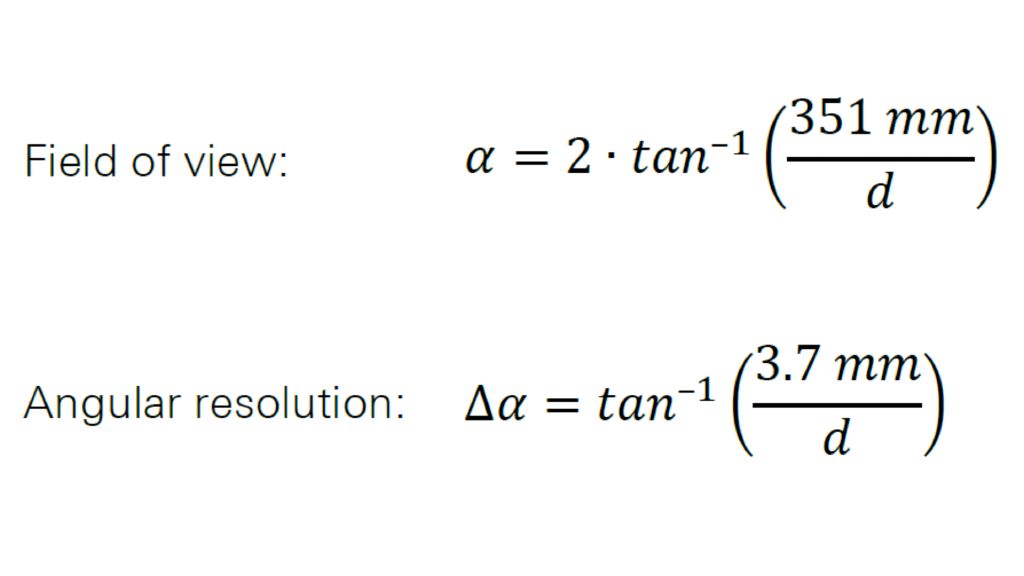
각 안테나는 3.7 mm (0.146 in) 간격으로 배치되어 있으며, 유닛의 총 너비는 351 mm (13.818 in)입니다. 셋업은 센서에 맞게 조정할 수 있습니다. R&S®QAT100은 일반적인 ADAS 레이더 송신 출력에 맞게 설계되었습니다.
R&S®QAT100의 FOV(시야각)과 달성 가능한 각도 분해능은 셋업에 따라 다르며 다음과 같이 계산됩니다.

AD(자율주행)와 ADAS(첨단 운전자 보조 시스템)는 자동차 산업의 혁신을 주도하는 주요 요인입니다. 레이더 센서는 AD 및 ADAS에 적용되는 핵심 기술 중 하나로, 보행자(차량 앞을 건너는 물체), 시내 운전(정지 또는 느린 속도로 전진하는 차량), 중심선 불일치(테스트 차량의 중심선이 타겟 차량의 중심선과 일치하지 않는 경우) 등 다양한 시나리오의 테스트를 진행할 필요가 있습니다.
ADAS 레벨 4 및 5를 충족하기 위해서는 더욱 복잡한 타겟 시뮬레이션 성능이 구현된 HIL(Hardware-in-the-Loop) 및 VIL(Vehicle-in-the-Loop) 테스트 시나리오가 필요합니다. 검증 프로세스를 더욱 빠르게 수행하기 위해 벤치탑 레이더 시뮬레이션 및 기능 테스트를 실시해야 한다는 의견도 증가하고 있습니다(그림 1).




그림 1: ADAS 레벨 및 자동화 수준 - 수준별 차량 센서 설정
거리와 주파수 대역에 따라 아래와 같은 값이 적용됩니다.


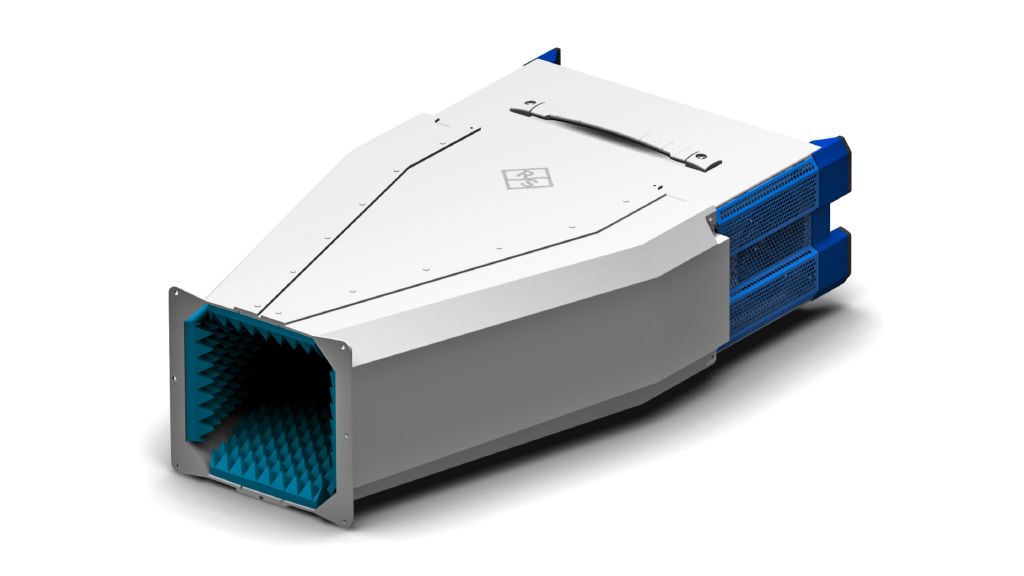
추가 차폐 시스템은 외부 간섭의 영향을 최소화하기 위해 간섭이 거의 없는 R&S®QAT100에 최적화된 RF 환경을 제공합니다. 차폐 시스템은 연구소 벤치탑 또는 차량 테스트 스탠드에서 사용할 수 있습니다. 차폐는 테스트 레이더에 대해 반사 없는 다중경로 환경을 제공합니다. 표면을 흡수체로 덮은 소형 패치 안테나에 R&S®QAT100을 결합할 경우 클린 RF 프론트엔드를 제공하며 인접 타겟과 잠재적 다중경로 반사를 억제합니다(그림 10 참조).
그림 10: 차폐 및 장착 세트
차폐 시스템이 R&S®QAT100과 결합하여 외부 신호의 레이더를 차폐합니다. 연결된 R&S®QAT100 Advanced Antenna Array(예: R&S®QAT-Z50 Shielding System, R&S®QAT-Z53 Shielding Trio)의 수에 따라 다른 크기를 이용할 수 있습니다.



오늘날 제조사 및 엔지니어링 서비스 제공업체는 Software-in-the-Loop 시스템으로 센서와 컨트롤 모듈을 테스트하는 시뮬레이션 환경을 이용합니다. 소프트웨어 시뮬레이션도 유효하지만 이 방식으로는 실제 환경에서 불완전 가능성이 있는 센서 응답을 복제할 수 없습니다. 완전 자율 차량은 이러한 불규칙성에 대응할 수 있어야 합니다. 제조사는 출시 전 최종 제품의 검증을 위해 프로토타입 또는 도로 주행에 적합한 차량의 전체 통합 시스템에 대한 실제 주행 테스트가 필요할 수 있습니다.주행 테스트는 개발 과정에서 중요한 단계이지만, 많은 비용과 시간이 소요되고 동일한 반복 시험이 어렵기 때문에 주행 테스트만으로 개발을 완료하는 것은 상당히 어렵습니다.
센서 개발의 전체 과정에서 단일 레이더 센서 구성요소 테스트와 같은 간단한 사용 사례 및 복수 센서가 포함된 복잡한 시나리오를 포함하는 추가적인 테스트가 필요합니다.목표는 다양한 실험 조건에서 ACC(Adaptive Cruise Control) 또는 긴급 브레이크 시스템과 같은 자율주행 기능을 테스트하는 것입니다(그림 2 참조).

그림 2: ADAS 센서 개발 프로세스
레이더 에코 발생기의 연결 유형 및 수는 테스트 셋업의 복잡도에 따라 달라집니다. 셋업 복잡도는 시뮬레이션 레이더 물체의 수, R&S®QAT100 Advanced Antenna Array의 수 또는 수신 안테나의 수(수신 안테나는 항상 수신하지만 백엔드에 연결된 경우에만 신호를 전달할 수 있음)에 따라 다릅니다.
레이더 에코 발생기는 개별적으로 컨트롤하는 안테나 세그먼트의 수에 따라 특정 수의 입력을 탑재해야 합니다.



그림 11 - 변형 1: 송신 신호를 "TX Σ" 커넥터에 연결합니다. 이제 모든 송신 안테나가 동일 신호를 공유합니다.

그림 11 - 변형 2: "TX A"의 송신 신호를 "TX D" 커넥터에 연결합니다. 이제 각 안테나 세그먼트가 다른 신호를 전송할 수 있어 TX 라인당 최대 4개 타겟을 지원합니다. RX 안테나를 레이더 에코 발생기의 "RX IF In"에 연결합니다. 레이더 에코 발생기로부터 단일 수신 신호만 원할 경우 "RX Select"를 한 개 "RX IF In"에 연결하십시오. 스펙트럼 분석기와 같은 기타 외부 장치를 연결하려면 "RX Select" 커넥터를 사용하십시오.
레퍼런스 주파수를 동기화하려면 주파수 레퍼런스(입력 또는 출력)를 레이더 에코 발생기에 연결합니다.
96개 송신 안테나의 R&S®QAT-B2 secondary line을 장착할 경우 R&S®QAT100은 각각 4개의 독립적인 세그먼트를 가진 2개 라인을 사용할 수 있어 단일 기기에서 개별 컨트롤이 가능한 8개 IF 경로에 연결할 수 있습니다. 이 시스템은 풀옵션 R&S®AREG800A Automotive Radar Echo Generator로 시뮬레이션되는 완전하게 독립된 가상 물체와 완벽히 결합됩니다. 각 IF 경로는 R&S®QAT100 세그먼트 내에서 자유롭게 변경할 수 있습니다.
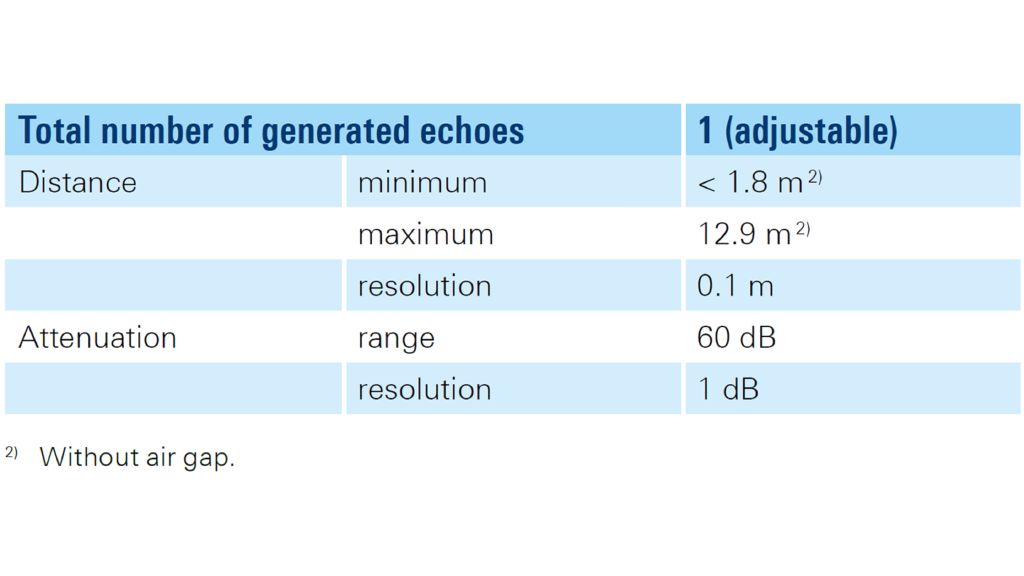
더 짧은 거리에서 타겟을 시뮬레이션할 경우 R&S®QAT100에 ASDL(Analog Stepped Delay Line)을 장착해 최소 지연 라인을 줄일 수 있습니다. 이 라인은 레이더 에코 발생기에서 대응하기 어려운 1.8 m ~ 12.9 m의 매우 짧은 거리에서 레이더 물체를 시뮬레이션할 수 있습니다. 또한, R&S®QAT100을 독립된 장비로 운용할 수 있습니다. 레이더 센서는 레이더 센서의 각도 분해능을 테스트하기 위해 특정 거리 또는 특정 각도에서 두 타겟을 구분합니다.
R&S®AREG800A에 타겟 시뮬레이터를 결합할 경우 움직이는 타겟을 에뮬레이션할 수 있습니다.

센서 개발 과정에서 현실 조건을 반영한 반복 가능 레이더 센서 테스트를 수행하는 것은 까다로운 작업입니다.
1) 센서 노이즈 플로어 감소, 인접 타겟 및 잠재적 다중경로 반사 억제.
요약
자율주행 운전자 보조 시스템은 환경 내 물체를 탐지하는 다양한 레이더 센서로부터 정확한 고품질 데이터를 빠르게 수신해야 합니다. 차량 제조사와 공급사는 자율주행 시나리오에서 이러한 센서를 테스트하는 것이 얼마나 복잡할 수 있는지를 알고 있습니다.
R&S®QAT100은 완전 전동식 각도 조절을 지원하는 최초의 솔루션으로 76 GHz ~ 81 GHz 대역에서 자동차 레이더 센서를 시뮬레이션하는 배열 안테나입니다. 모듈식 R&S®QAT100 컨셉으로 제조사와 파트너사가 ADAS 시스템 개발 및 테스트에 주력할 수 있습니다.
오픈 아키텍처 OEM은 공급업체와 서비스 제공업체가 R&S®QAT100 플랫폼을 상용 3D 모델링, Hardware-in-the-Loop 시스템, 기존 테스트 및 시뮬레이션 환경에 쉽게 통합할 수 있는 시스템을 설계합니다. 간단한 기능 구성요소 검증부터 매우 복잡한 멀티타겟 시나리오 테스트까지, 전체 과정에서 자동차 레이더 센서를 더욱 빠르게 테스트할 수 있습니다.








를 적용한 ADAS 센서 개발 프로세스")
를 적용한 ADAS 센서 개발 프로세스")





