Terminal contrôlable électroniquement pour la qualification de radars automobiles
Premier faisceau d'antenne entièrement contrôlable électroniquement.
Premier faisceau d'antenne entièrement contrôlable électroniquement.
Votre tâche
Les systèmes de conduite autonome (AD) et les systèmes avancés d'aide à la conduite (ADAS) sont les moteurs essentiels de l'innovation au sein de l'industrie automobile. Les capteurs radar sont l'une des technologies essentielles pour l'AD et l'ADAS, ils doivent être testés au sein de différents scénarios tels que piétons (un objet traversant devant la voiture), conduite urbaine (conduite en direction d'un véhicule stationnaire ou plus lent) et trajets inter-urbains (identique au trajet urbain où l'axe central du véhicule de test n'est pas aligné avec le centre de la cible).
Les scénarios de test de matériel dans la boucle (HIL) et de véhicule dans la boucle (VIL) avec des capacités de simulation de cible plus complexes sont nécessaires pour atteindre les niveaux ADAS 4 et 5. La demande est également croissante en ce qui concerne la simulation de radar sur banc et les tests fonctionnels afin d'accélérer le processus de validation (Fig. 1).


Fig. 1 : Niveaux ADAS et degré d'automatisation : configurations potentielles du véhicule


Fig. 2 : Processus de développement d'un capteur ADAS
De nos jours, les équipementiers (OEM) et les fournisseurs de service utilisent des environnements simulés avec des systèmes de logiciel dans la boucle afin de tester les capteurs et les modules de contrôle. Les simulations logicielles sont de qualité, mais elles ne peuvent pas reproduire les réponses réelles et potentiellement imparfaites des capteurs. Les véhicules entièrement autonomes doivent faire face à ces irrégularités. Le test sur route d'un système entier intégré au sein d'un prototype ou d'un véhicule routier est nécessaire, car il permet aux OEM de valider un produit final avant le lancement sur le marché. Le test sur route est important pour le processus de développement mais les tests sur route seuls ne sont pas suffisants : ils sont coûteux, chronophages et difficilement reproductibles.
Un autre test est nécessaire sur l'ensemble de la chaîne de valeur du développement du capteur, et des cas d'utilisation tels que le test de composants d'un seul capteur radar et le test de scénarios complexes dotés de plusieurs capteurs doivent être intégrés. L'objectif est de tester les fonctions de la conduite autonome telles que le contrôle du régulateur de vitesse ou les systèmes de freinage d'urgence sous diverses conditions de laboratoire (voir Fig. 2).
Un test de capteur radar réaliste et reproductible est complexe au sein de la chaîne de valeur du capteur :
1) Réduction du plancher de bruit du capteur, ainsi que suppression des cibles à courte portée et de potentielles réflexions multi-trajets.
Solution Rohde & Schwarz
Les simulateurs de cibles actuels utilisent des antennes à cornet comme terminaisons, où chaque point cible les capteurs radar et émule les positions horizontale et verticale en déplaçant mécaniquement l'antenne. L'automatisation mécanique ralentit les temps de test globaux. Chaque mouvement d'antenne change l'angle d'arrivée (AoA) de l'écho, engendrant des erreurs et des pertes de précision lors de l'interprétation des cibles lorsque les antennes ne sont pas recalibrées ou recalculées.
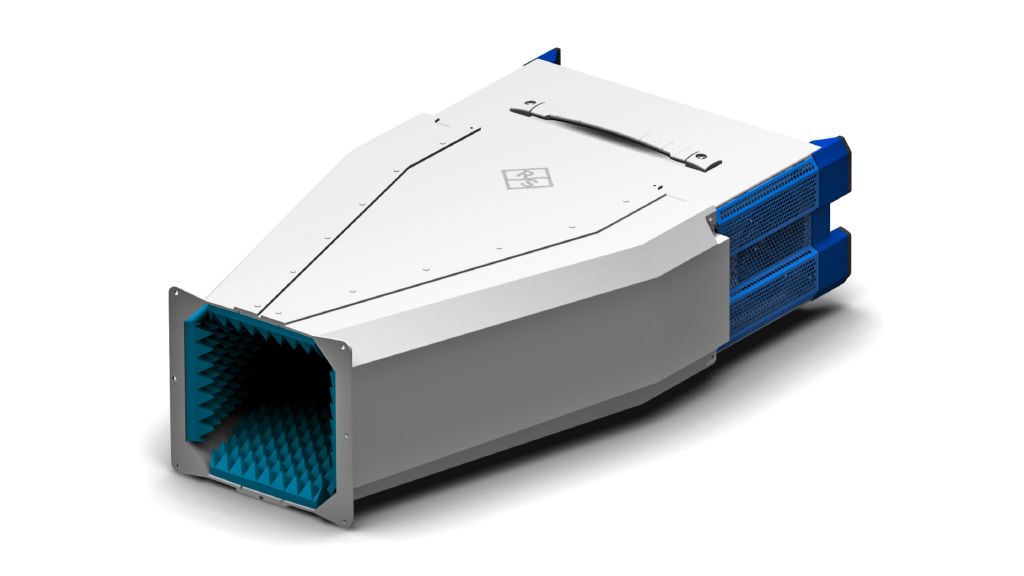
Afin de surmonter ces limitations des systèmes actuels et répondre à la croissance importante des HIL et VIL, Rohde & Schwarz a développé le faisceau d'antennes avancé R&S®QAT100 – le premier faisceau d'antennes orientable électroniquement au monde. Le R&S®QAT100 simule l'azimut et l'élévation en activant de petites antennes planes. Le temps de commutation entre les antennes est d'environ 2 ms afin de simuler les cibles azimutales se déplaçant rapidement (par exemple au sein du trafic à une intersection ou des scénarios de dépassement).
Aperçu des capteurs radar


Stimulation radar sans fil dans l'élévation et l'azimut sans antennes se déplaçant physiquement
RF propre : aucune réflexion depuis la FE
Les antennes PCB possèdent un RCS beaucoup plus faible que les cornets à gain standard utilisés dans d'autres systèmes. Le système de blindage R&S®QAT-B50 garantit un environnement RF blindé.
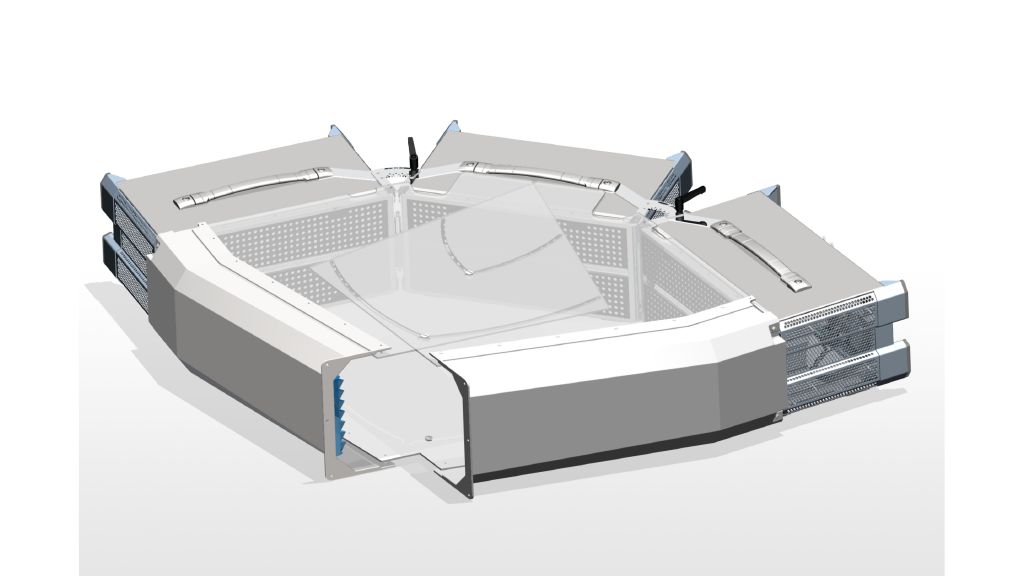
Solution évolutive
Plusieurs terminaux peuvent être combinés afin de simuler jusqu'à 360° de l'environnement radar :
Résistant aux vibrations : parfaitement adapté pour le montage de test VIL
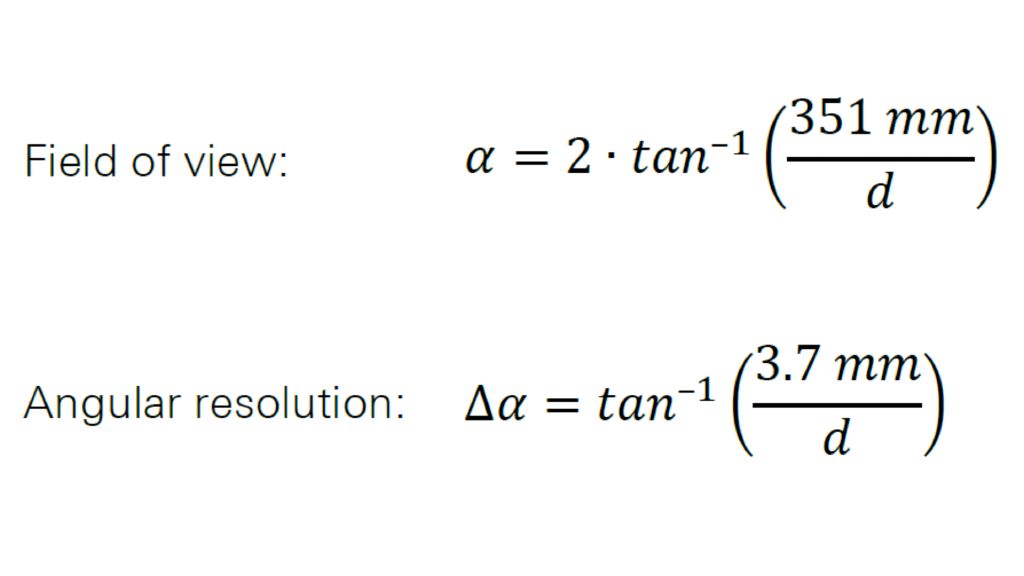
1) Champ de vision.
Cas d'utilisation
La configuration modulaire du R&S®QAT100 peut être utilisée dans diverses applications pour des simulations de cibles radar.
Test de composant ou fonctionnel
Il commence avec des cas d'utilisation très simple tel que le test d'un composant pour un capteur radar unique. Pour tester si un capteur radar détecte correctement un écho, s'il fait la distinction entre deux cibles à une distance donnée ou avec un angle donné, ainsi que la résolution angulaire de votre capteur radar.
Test de scénario
Les cas d'utilisation secondaires concernent le test de scénario, comme des scénarios de trafic avec plusieurs voitures, de systèmes de freinage d'urgence ou de régulateur de vitesse. L'objectif est de simuler des cibles mobiles en azimut, portée, vélocité radiale et taille de cible. Selon le scénario, un ou plusieurs capteurs peuvent être simulés.


Le R&S®QAT100 a la polyvalence et la capacité de prendre en charge le processus complet sur toute la chaîne du capteur radar.
En commençant avec le R&S®QAT100 en tant qu'appareil autonome pour l'évaluation de la performance d'un capteur radar à des étapes précoces avec des configurations de banc classiques, jusqu'à des applications HIL et VIL (avec un simulateur de cible en arrière plan) au niveau du module du capteur radar lors de l'adaptation d'un capteur aux spécifications de l'OEM (Fig. 6).


Le terminal standard R&S®QAT-B11 possède 96 antennes d'émission et 5 de réception, divisées en 4 parties indépendantes. La configuration répond aux exigences de capteur SIMO. Le R&S®QAT100 peut être utilisé en mode ligne ou en mode segment, selon ce qui est nécessaire. Le mode segment divise chaque ligne en quatre segments, où chacun a un connecteur RF individuel et peut simuler jusqu'à quatre cibles provenant de différentes directions. Le R&S®QAT-B11 peut être fourni avec une ligne TX/RX additionnelle (R&S®QAT-B2) afin d'ajouter 96 autres antennes d'émission et 5 de réception afin de simuler jusqu'à 8 cibles provenant de différentes directions ou deux objets sur l'ensemble du faisceau.
Le décalage le plus important entre les antennes RX et TX signifie que le R&S®QAT-B11 ne répond pas entièrement aux exigences MIMO car il peut être sauté à différents angles. Le terminal MIMO simple ligne R&S®QAT-B21 possède une ligne de réception et une ligne d'antenne d'émission. Chaque antenne d'émission est pairée avec une antenne de réception pour répondre aux exigences MIMO. 96 antennes de réception et 96 antennes d'émissions sont dorénavant disponibles afin de minimiser les erreurs de phase et permettre une validation simple des radars MIMO avec une résolution spatiale de l'écho améliorée en trois dimensions.
Les antennes individuelles mesurent 3,7 mm (0.146 in), alors que la largeur de l'unité totale est de 351 mm (13.818 in). La configuration peut être adaptée au capteur. Le R&S®QAT100 a été conçu pour une puissance de transmission radar ADAS typique.
Le champ de vision (FOV) et la résolution angulaire atteignable pour le R&S®QAT100 sont basés sur la configuration et sont calculés comme suit :

Les systèmes de conduite autonome (AD) et les systèmes avancés d'aide à la conduite (ADAS) sont les moteurs essentiels de l'innovation au sein de l'industrie automobile. Les capteurs radar sont l'une des technologies essentielles pour l'AD et l'ADAS, ils doivent être testés au sein de différents scénarios tels que piétons (un objet traversant devant la voiture), conduite urbaine (conduite en direction d'un véhicule stationnaire ou plus lent) et trajets inter-urbains (identique au trajet urbain où l'axe central du véhicule de test n'est pas aligné avec le centre de la cible).
Les scénarios de test de matériel dans la boucle (HIL) et de véhicule dans la boucle (VIL) avec des capacités de simulation de cible plus complexes sont nécessaires pour atteindre les niveaux ADAS 4 et 5. La demande est également croissante en ce qui concerne la simulation de radar sur banc et les tests fonctionnels afin d'accélérer le processus de validation (Fig. 1).




Fig. 1 : Niveaux ADAS et degré d'automatisation : configurations potentielles du véhicule
Selon la distance et la gamme de fréquence, les valeurs suivantes s'appliquent :


Pour minimiser l'influence de l'interférence externe, un système de blindage additionnel fournit un environnement RF proche sans interférence parfaitement adapté au R&S®QAT100. Le système de blindage peut être utilisé dans des laboratoires sur des bancs ou sur un véhicule de test. Le blindage fournit un environnement multi-trajets et sans réflexion pour le radar sous test. Lorsqu'il est combiné avec le R&S®QAT100, des petites antennes planes recouvertes d'une surface d'absorption fournissent un terminal RF propre et suppriment les cibles à courte portée, ainsi que les potentielles réflexions multi-trajets (voir Fig. 10).
Fig. 10 : Blindage et montage
Le système de blindage se connecte au R&S®QAT100 et protège les radars des signaux externes. Il est disponible en différentes tailles selon le nombre de faisceaux d'antennes avancés R&S®QAT100 connectés (par exemple un système de blindage R&S®QAT-Z50, triple blindage R&S®QAT-Z53).



De nos jours, les équipementiers (OEM) et les fournisseurs de service utilisent des environnements simulés avec des systèmes de logiciel dans la boucle afin de tester les capteurs et les modules de contrôle. Les simulations logicielles sont de qualité, mais elles ne peuvent pas reproduire les réponses réelles et potentiellement imparfaites des capteurs. Les véhicules entièrement autonomes doivent faire face à ces irrégularités. Le test sur route d'un système entier intégré au sein d'un prototype ou d'un véhicule routier est nécessaire, car il permet aux OEM de valider un produit final avant le lancement sur le marché. Le test sur route est important pour le processus de développement mais les tests sur route seuls ne sont pas suffisants : ils sont coûteux, chronophages et difficilement reproductibles.
Un autre test est nécessaire sur l'ensemble de la chaîne de valeur du développement du capteur, et des cas d'utilisation tels que le test de composants d'un seul capteur radar et le test de scénarios complexes dotés de plusieurs capteurs doivent être intégrés. L'objectif est de tester les fonctions de la conduite autonome telles que le contrôle du régulateur de vitesse ou les systèmes de freinage d'urgence sous diverses conditions de laboratoire (voir Fig. 2).

Fig. 2 : Processus de développement d'un capteur ADAS
Le nombre et les types de connexions à un générateur d'échos radar dépendent de la complexité de la configuration de test. La complexité de la configuration dépend du nombre d'objets radar simulés, du nombre de faisceaux d'antennes avancés R&S®QAT100 ou du nombre d'antennes de réception (les antennes de réception reçoivent toujours, mais peuvent uniquement transférer un signal lorsqu'elles sont connectées à une infrastructure).
Selon le nombre de segments d'antennes contrôlés individuellement, un générateur d'échos radar doit avoir un certain nombre d'entrées :



Fig. 11 - Variante 1 : Connecter le signal émis au connecteur “TX Σ”. Toutes les antennes d'émission partagent le même signal.

Fig. 11 - Variante 2 : Connecter le signal d'émission provenant de “TX A” au connecteur “TX D”. Chaque segment d'antenne peut émettre un signal différent, permettant jusqu'à quatre cibles par ligne TX. Connecter les antennes RX à l'entrée “RX IF In” sur le générateur d'échos radar. Si vous voulez un seul signal de réception provenant du générateur d'échos radar, connectez “RX Select” à une entrée “RX IF In”. Pour connecter d'autres appareils externes tels qu'un analyseur de spectre, utilisez le connecteur “RX Select”.
Pour synchroniser des fréquences de référence, connectez la fréquence de référence (entrée ou sortie) au générateur d'échos radar.
Lorsqu'il équipé de la seconde ligne de 96 antennes d'émission R&S®QAT-B2, le R&S®QAT100 possède deux lignes avec quatre segments indépendants chacune, permettant à un seul instrument d'être connecté à huit trajets IF contrôlables individuellement. Cela se combine parfaitement avec les huit objets artificiels complètement indépendants simulés par un générateur d'échos radar automobiles R&S®AREG800A entièrement équipé. Chaque trajet IF peut être librement contrôlé au sein d'un segment R&S®QAT100.
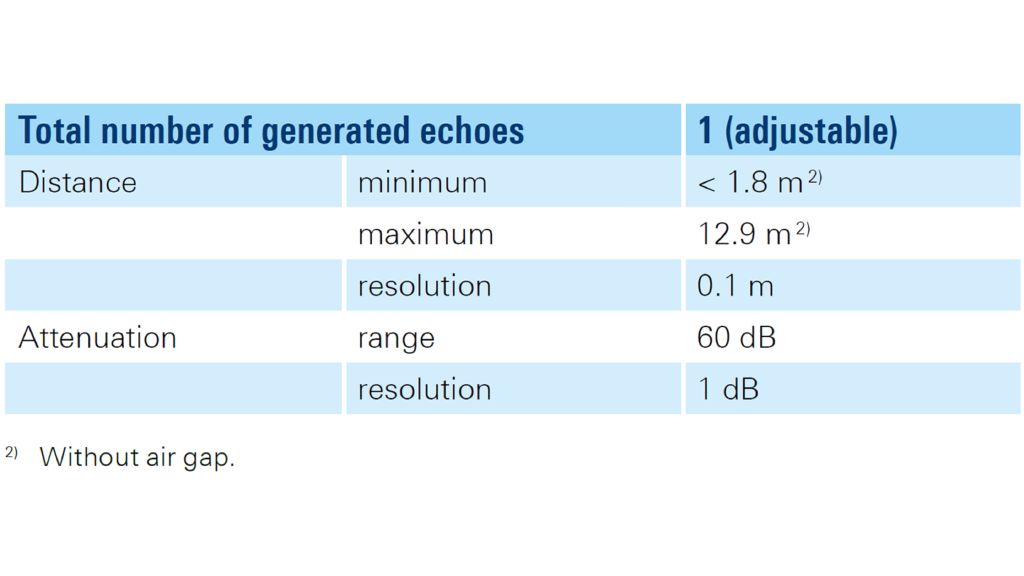
Pour simuler des cibles à une portée plus courte, le R&S®QAT100 peut être équipé d'une ligne analogique à retard échelonné (ASDL) afin de réduire le retard minimal de ligne. Cette ligne peut simuler des objets radar à de très courtes distances de 1,8 m jusqu'à 12,9 m qui sont compliquées pour les générateurs d'échos radar. Il permet également l'utilisation autonome du R&S®QAT100. Pour tester la résolution angulaire de votre capteur radar, le capteur radar distingue deux cibles à une distance donnée ou à un angle donné.
En combinaison avec un simulateur de cible, le R&S®AREG800A peut émuler des cibles mobiles.

Un test de capteur radar réaliste et reproductible est complexe au sein de la chaîne de valeur du capteur :
1) Réduction du plancher de bruit du capteur, ainsi que suppression des cibles à courte portée et de potentielles réflexions multi-trajets.
Conclusion
Les systèmes d'aide à la conduite autonome ont besoin urgemment de données fiables et haute qualité provenant de divers capteurs radar qui détectent des objets dans l'environnement. Les entreprises et fournisseurs automobiles savent à quel point il est compliqué de tester ces capteurs dans des scénarios de conduite autonome.
Le R&S®QAT100 est le premier faisceau d'antennes entièrement contrôlable électroniquement qui stimule les capteurs radar automobiles dans la gamme allant de 76 GHz à 81 GHz. Le concept modulaire du R&S®QAT100 permet aux équipementiers automobiles et leurs partenaires de se concentrer sur le développement et le test des systèmes ADAS.
L'architecture ouverte des équipementiers permet aux fournisseurs et aux fournisseurs de services d'intégrer facilement la plateforme R&S®QAT100 au sein d'une modélisation 3D commerciale, de systèmes de matériel dans la boucle, ainsi que d'environnements de test et de simulation existants. Un test plus rapide des capteurs radar automobiles tout au long de la chaîne de valeur est possible à partir d'une simple validation fonctionnelle de composant jusqu'à un test de scénario très complexe multi-trajets.









