車載用レーダー検証のための電子式操縦可能フロントエンド
世界初の完全電子式操縦可能アンテナアレイ。
世界初の完全電子式操縦可能アンテナアレイ。
課題
自動運転(AD)と先進運転支援システム(ADAS)は、自動車業界のイノベーション推進の最大要因です。レーダーセンサは、ADやADASの鍵となるテクノロジーの1つであり、さまざまなシナリオでのテストを必要とします。例えば、歩行者(自動車の前を横切る対象物)、街中での運転(静止状態または低速移動中の車両に向かっての運転)、都市間移動(都市内での移動と似ているが、テスト車両の中心線がターゲットの中心と一致していない)などです。
ADASレベル4および5に到達するには、さらに複雑なターゲットシミュレーション機能によるハードウェア・イン・ザ・ループ(HIL)およびビークル・イン・ザ・ループ(VIL)テストシナリオが必要です。検証プロセスの高速化のため、ベンチトップレーダーシミュレーションおよびファンクションテストへの需要も高まっています(図1)。
今日、OEMやエンジニアリングサービスプロバイダーは、ソフトウェア・イン・ザ・ループ(SIL)システムによるシミュレーション環境を利用して、センサや制御モジュールをテストしています。ソフトウェアエミュレーションは便利ですが、実環境のセンサ応答の潜在的な不完全性は再現できません。完全自動運転車は、このような不規則性に対処できる必要があります。OEMが発売前に最終製品を検証するためには、プロトタイプや公道仕様の自動車の統合されたシステム全体のロードテストが必要です。ロードテストは開発プロセスにとって重要ですが、ロードテストだけでは不十分です。コストと時間がかかる上、再現性が低いからです。
センサ開発のバリューチェーン全体でさらに追加のテストが必要であり、単一のレーダーセンサコンポーネントのテストのような単純なユースケースと、複数のセンサが用いられる複雑なシナリオのテストの両方を統合する必要があります。その目標は、アダプティブクルーズコントロールや緊急ブレーキシステムなどの自動運転機能を、さまざまなラボ条件の下でテストすることです(図2を参照)。
センサのバリューチェーン内での現実的で再現性のあるレーダーセンサテストは困難です。
1) センサのノイズフロアの低減と、近距離ターゲットおよび潜在的なマルチパス反射の抑制。
ローデ・シュワルツのソリューション
現在のターゲットシミュレーターは、ホーンアンテナをフロントエンドとして使用し、各ポイントがレーダーセンサをターゲットとして、アンテナを機械的に動かすことで水平/垂直位置をエミュレートします。この機械式オートメーションでは、テストに時間がかかります。アンテナが移動するたびにエコーの到来角(AoA)が変化するため、アンテナを再計算または再校正しない限り、ターゲットのレンダリングに誤差や精度の低下が生じます。
現在のシステムの制限を克服し、HILおよびVILの重要性の増加に対処するため、ローデ・シュワルツはR&S®QAT100 高度なアンテナアレイを開発しました。これは、世界初の電子式操縦可能アンテナアレイです。R&S®QAT100は、小型のパッチアンテナを作動させることで、方位角と仰角をシミュレートします。アンテナ間の切り替え時間は約2 msなので、方位角方向に高速移動するターゲット(交差点の交差交通や通過などのシナリオ)をシミュレートできます。
レーダーセンサの概要


アンテナを物理的に動かさずに仰角と方位角のOTAレーダーシミュレーションが可能
クリーンなRF:FEからの反射なし
PCBアンテナは、他のシステムで用いられる標準利得ホーンよりRCSがはるかに小さくなります。R&S®QAT-B50 シールドシステムにより、シールドされたRF環境が得られます。
スケーラブルなソリューション
複数のフロントエンドを組み合わせることで、最大360°のレーダー環境のシミュレーションが可能:
高い耐振動性:VILテストベッドへの取り付けに最適
1) 視野角。
ユースケース
R&S®QAT100のモジュラーセットアップは、レーダーターゲットシミュレーションのさまざまなアプリケーションに使用できます。
コンポーネント/ファンクションテスト
最初は、単一のレーダーセンサのコンポーネントテストのようなきわめて単純なユースケースです。レーダーセンサがエコーを正しく検出し、所定の距離または角度の2つのターゲットを識別できるかどうかと、レーダーセンサの角度分解能をテストします。
シナリオテスト
2番目のユースケースは、シナリオテストです。これには、複数の自動車、緊急ブレーキシステム、またはアダプティブクルーズコントロール(ACC)を含むトラフィックシナリオが含まれます。目標は、移動するターゲットの方位角、距離、動径速度、ターゲットサイズをシミュレートすることです。シナリオに応じて、1つまたは複数のセンサがシミュレートされます。


R&S®QAT100は、レーダーセンサチェーンのプロセス全体をサポートする汎用性と機能を備えています。
初期段階では、一般的なベンチトップセットアップで、R&S®QAT100をスタンドアロンのデバイスとして使用して、レーダーセンサの性能評価を行い、センサをOEM仕様に適合させる際には、レーダーセンサモジュールレベルでのHIL/VILアプリケーション(ターゲットシミュレーターをバックエンドに使用)を実行できます(図6)。
R&S®QAT-B11 標準フロントエンドには、96個の送信アンテナと5個の受信アンテナがあり、4つの独立したセグメントに分割されています。この構成は、SIMOセンサの要件を満たします。R&S®QAT100は、必要に応じてラインモードまたはセグメントモードで動作させることができます。セグメントモードでは、各ラインが4つのセグメントに分割されます。各セグメントは独立のRFコネクタを備え、異なる方向からの最大4つのターゲットをシミュレートできます。R&S®QAT-B11に追加のTX/RXライン(R&S®QAT-B2)を装備することで、さらに96個の送信アンテナと5個の受信アンテナを追加して、アレイ全体で異なる方向からの最大8つのターゲットまたは2つの対象物をシミュレートできます。
R&S®QAT-B11は、RXアンテナとTXアンテナの間のオフセットが大きいため、MIMOの要件を完全には満たしません。異なる角度でジャンプする可能性があるためです。R&S®QAT-B21 シングルラインMIMOフロントエンドは、受信アンテナと送信アンテナのラインを1つずつ備えています。すべての送信アンテナが受信アンテナと対応付けられているため、MIMOの要件を満たします。96個の受信アンテナと96個の送信アンテナにより、位相誤差を最小化し、3つの次元での空間エコー分解能の向上により、MIMOレーダーの容易な検証を可能にします。
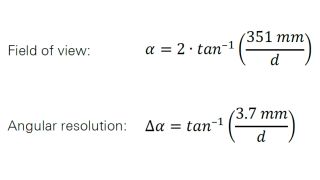
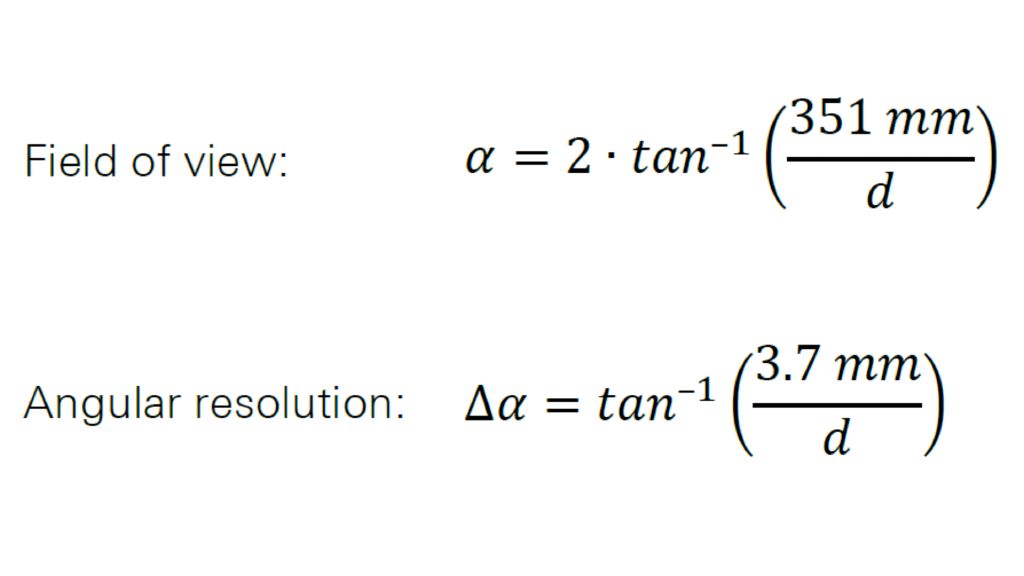
各アンテナの間隔は3.7 mm(0.146インチ)、ユニット全体の幅は351 mm(13.818インチ)です。セットアップはセンサに合わせて変更できます。R&S®QAT100は、ADASレーダーの代表的な送信パワーに合わせて設計されています。
R&S®QAT100の視野角(FOV)と達成可能な角度分解能はセットアップに基づき、次のように計算できます。
自動運転(AD)と先進運転支援システム(ADAS)は、自動車業界のイノベーション推進の最大要因です。レーダーセンサは、ADやADASの鍵となるテクノロジーの1つであり、さまざまなシナリオでのテストを必要とします。例えば、歩行者(自動車の前を横切る対象物)、街中での運転(静止状態または低速移動中の車両に向かっての運転)、都市間移動(都市内での移動と似ているが、テスト車両の中心線がターゲットの中心と一致していない)などです。
ADASレベル4および5に到達するには、さらに複雑なターゲットシミュレーション機能によるハードウェア・イン・ザ・ループ(HIL)およびビークル・イン・ザ・ループ(VIL)テストシナリオが必要です。検証プロセスの高速化のため、ベンチトップレーダーシミュレーションおよびファンクションテストへの需要も高まっています(図1)。




図1:ADASレベルと自動化の度合い:可能な車両構成
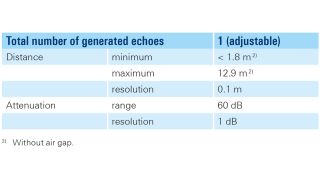
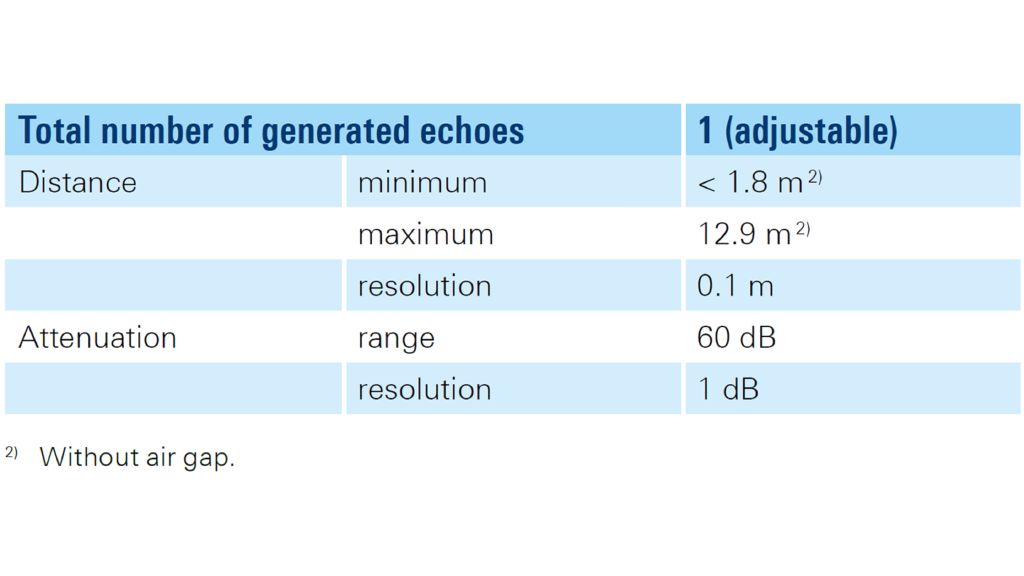
距離と周波数レンジに応じて、次の値が適用されます。


外部干渉の影響を最小化するため、追加のシールドシステムにより、R&S®QAT100に最適な、ほぼ干渉のないRF環境が得られます。このシールドシステムは、ラボのベンチトップでも、車両内のテストスタンドでも使用できます。シールドにより、被試験レーダーに対してマルチパスと反射のない環境が提供されます。表面が吸収材で覆われた小型パッチアンテナをR&S®QAT100と組み合わせることで、クリーンなRFフロントエンドが得られ、近距離のターゲットや潜在的なマルチパス反射が抑制されます(図10を参照)。
図10:シールドおよび取り付けセット
シールドシステムはR&S®QAT100に接続され、レーダーを外部信号からシールドします。接続するR&S®QAT100 高度なアンテナアレイの数に応じて、いくつかのサイズがあります(R&S®QAT-Z50 シールドシステム、R&S®QAT-Z53 シールドトリオなど)。

今日、OEMやエンジニアリングサービスプロバイダーは、ソフトウェア・イン・ザ・ループ(SIL)システムによるシミュレーション環境を利用して、センサや制御モジュールをテストしています。ソフトウェアエミュレーションは便利ですが、実環境のセンサ応答の潜在的な不完全性は再現できません。完全自動運転車は、このような不規則性に対処できる必要があります。OEMが発売前に最終製品を検証するためには、プロトタイプや公道仕様の自動車の統合されたシステム全体のロードテストが必要です。ロードテストは開発プロセスにとって重要ですが、ロードテストだけでは不十分です。コストと時間がかかる上、再現性が低いからです。
センサ開発のバリューチェーン全体でさらに追加のテストが必要であり、単一のレーダーセンサコンポーネントのテストのような単純なユースケースと、複数のセンサが用いられる複雑なシナリオのテストの両方を統合する必要があります。その目標は、アダプティブクルーズコントロールや緊急ブレーキシステムなどの自動運転機能を、さまざまなラボ条件の下でテストすることです(図2を参照)。

図2:ADASセンサの開発プロセス
レーダーエコー発生器への接続の数とタイプは、テストセットアップの複雑さによって変わります。セットアップの複雑さは、シミュレートするレーダー対象物の数、R&S®QAT100 高度なアンテナアレイの数、または受信アンテナの数に依存します(受信アンテナは常に受信しますが、信号を転送できるのはバックエンドに接続された場合だけです)。
個別に制御されるアンテナセグメントの数に応じて、レーダーエコー発生器には特定の数の入力が必要です。


図11 - バリアント1:送信信号を "TX ∑" コネクタに接続します。この場合、すべての送信アンテナが同じ信号を共有します。

図11 - バリアント2:送信信号を "TX A" ~ "TX D" コネクタに接続します。この場合、各アンテナセグメントが異なる信号を送信でき、TXラインあたり最大4つのターゲットを実現できます。RXアンテナをレーダーエコー発生器の "RX IF In" に接続します。レーダーエコー発生器から1つの受信信号だけを得たい場合は、"RX Select" を1つの "RX IF In" に接続します。スペクトラム・アナライザなどの他の外部機器を接続するには、"RX Select" コネクタを使用します。
基準周波数を同期するには、周波数基準(入力または出力)をレーダーエコー発生器に接続します。
96個の送信アンテナを備えたR&S®QAT-B2 セカンドラインを装備した場合、R&S®QAT100は4つの独立したセグメントからなるラインを2つ備え、個別に制御可能な8つのIF経路に1台の測定器で接続できます。これは、フル装備のR&S®AREG800A 車載用レーダーエコー発生器でシミュレートされる8つの完全に独立した人工的物体と最適な組み合わせになります。各IF経路は、R&S®QAT100セグメント内で自由に操縦可能です。
もっと短距離のターゲットをシミュレートする場合、R&S®QAT100にアナログステップ遅延ライン(ASDL)を装備することで、最小遅延ラインを短縮できます。このラインを使えば、レーダーエコー発生器では困難な1.8 m~12.9 mという非常に短い距離のレーダー対象物をシミュレートできます。また、これによりR&S®QAT100のスタンドアロン使用も可能になります。レーダーセンサの角度分解能をテストする場合、レーダーセンサは所定の距離または角度の2つのターゲットを識別します。
ターゲットシミュレーターと組み合わせることで、R&S®AREG800Aは移動するターゲットをエミュレートできます。
センサのバリューチェーン内での現実的で再現性のあるレーダーセンサテストは困難です。
1) センサのノイズフロアの低減と、近距離ターゲットおよび潜在的なマルチパス反射の抑制。
まとめ
自動運転支援システムでは、環境内の対象物を検出するさまざまなレーダーセンサからの信頼性の高い高品質のデータが緊急に必要とされます。自動車会社やサプライヤーは、自動運転シナリオでのこのようなセンサのテストがどれほど複雑かを知っています。
R&S®QAT100は、初めての完全電子式操縦可能アンテナアレイであり、76 GHz~81 GHzのレンジの車載用レーダーセンサに信号を供給できます。R&S®QAT100はモジュラー方式なので、自動車OEMやパートナーは、ADASシステムの開発とテストに専念できます。
オープンアーキテクチャーのOEMの場合、サプライヤーやサービスプロバイダーは、R&S®QAT100プラットフォームを、商用の3Dモデリング、HILシステム、既存のテスト/シミュレーション環境に容易に統合できます。シンプルな機能コンポーネント検証から高度に複雑なマルチターゲットシナリオのテストまで、バリューチェーン全体で車載用レーダーセンサのテストを高速化できます。








")
")